The GSO Ritchey-Chretien 16" Optical Tube Assembly (OTA) has been troublesome to me and to many others on the web. Mainly, the collimation doesn't hold over temperature changes and where its pointing - the former due to differential expansion coefficients of the aluminum saddle bars and the truss carbon fibre rods, and latter from the stresses emparted to the truss from the flexing of the saddle bars. Stars went from circular at 2.5"/sec FWHM to 45"/sec heavily distorted under -5C in winter as compared to summer when it was collimated. A further source, albeit less so, is the stock mono-rail focuser that can't hold the optical axis with a 5kg imaging train. A mono-rail focuser is great, so long as the bearing is scaled to the imaging payload.
I had worsened these effects by:
1) mounting the OTA in a fork mount that is difficult to align the declination bearings imparting stresses to the OTA with declination
2) making my own solid saddle bars (Losmandy style dove tail saddle mounts are not easy to use on a fork)
With temperatures ranging from -30C to +30C in Ontario, I tested the theory of differential expansion by milling out my solid saddle bars and the useful range had moved down to -15C. To both solve this and the fork mount declination axial misalignment, I was going to build a large frame to hold the RC16 only from its middle truss plate, but that would have been a challenging exercise. Finally I chose to go to my original design of an offset single arm mount, holding the OTA only from one side. I was going to cut off one of the fork arms but reasoned that if I kept it, it would handle much of the balancing weight required and also allow going back to a fork mount if that came to be.
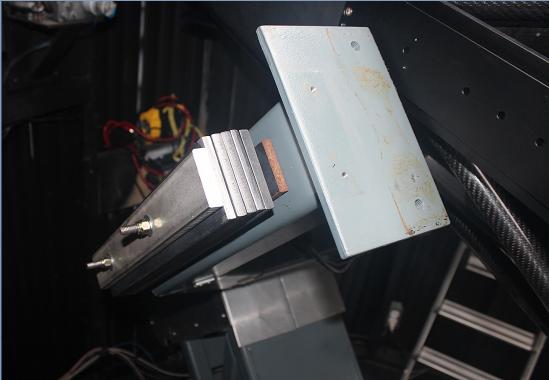
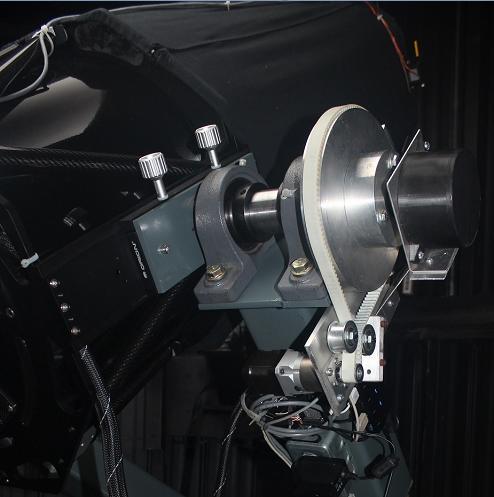
I therefore took the OTA off, extended the western declination bearing plate, installed both bearings on it, which gave a very solid, stable and zero backlash support. I also tossed my milled out saddle bars and went back to the GSO dove saddle bars. I also had to move the encoder to that side of the scope. Despite keeping the eastern fork arm, I had to add 25 lbs of counter weight. I surmise this is probably the only fork mount ever to have graced the earth that only has its OTA connected on one arm!
There hasn't been suitable skies to test this configuration out, but I observed (with no surprise) that the GSO saddle bar twists from the 50kg OTA, which surely applies stress on the truss plates. Costlier RC scopes use sturdy saddle bars and a flexing lateral plate between the bar and OTA to handle the differential expansion but otherwise hold solidly in the other two axes. I contemplated doing so, but there is no margin to doing so unless I cut the free fork arm off.
The OTA had to be removed from the observatory to work on the mount. It's quite a nerve racking experience, both when using the hoist to remove the OTA from the mount, and tractor to bring it to the shop 150m away. I plan on changing the hoist so that its on its own removable and adjustable gantry that will ride on the turret's upper slit rails, thereby allowing it to be used for both observatories.
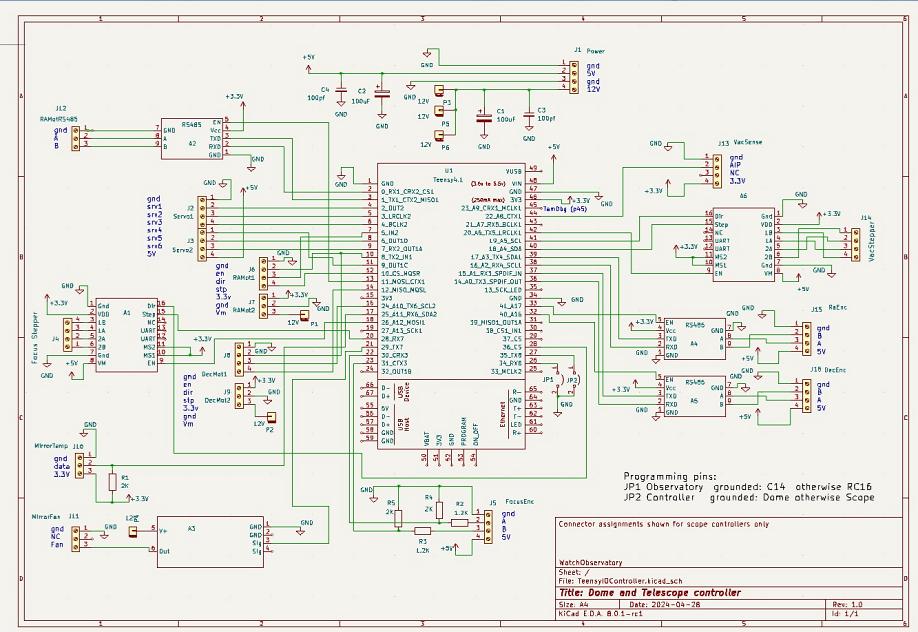
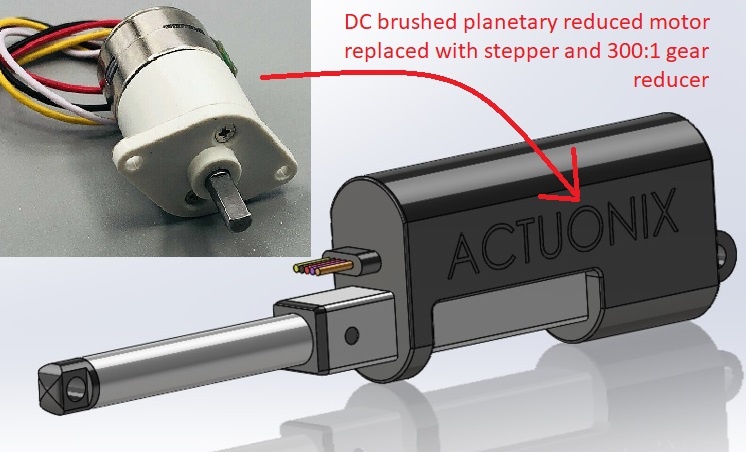
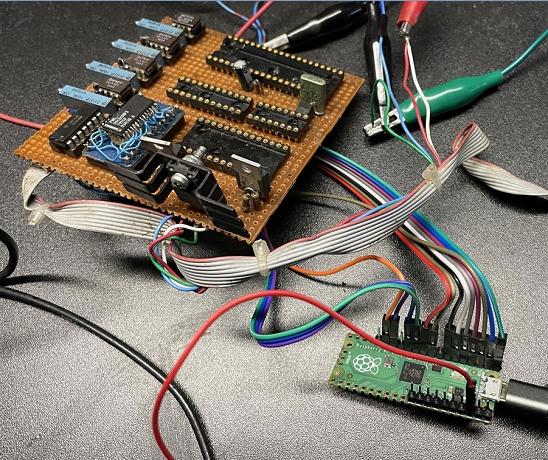
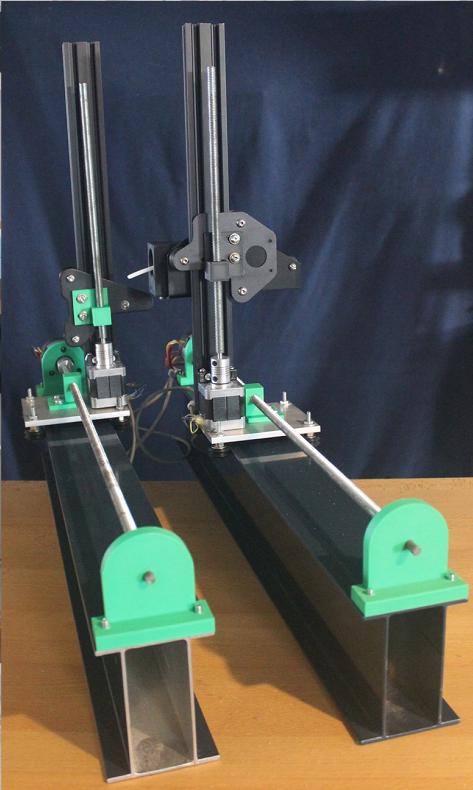
Another improvement was to change out the brushed DC planetary 250:1 geared motor of the Actuonix P16 linear actuator with a 300:1 geared stepper motor, as despite the gearing and PWM control, it was troublesome to control the focus precisely for FocusMax v5 to reach its full potential. Fortunately the eBay 5$ geared stepper had the same shaft keying so it fit right in. To control the stepper, I reused the same design I did for the RA drives of both scopes, that is an RPi Pico, Pololu STSPIN820 stepper driver and Python interfaced by VCP over USB. It improved the controllability ten fold - problem solved.
.jpg)


{kind=link}